Bitcoin Confirmations: 5 Ways to Speed Up a Transaction

Bitcoin transaction confirmation is a process involving miners, senders, and recipients, that adds a transaction to a new block and confirms its validity. The purpose of the check is to protect users from re-spending money and attempts to make changes to the source code of the system. Below we consider what confirmation in the Bitcoin network is, how it works, and why it is necessary. Separately, we will analyze ways to accelerate transactions and their features.
What is it?
Bitcoin is a digital currency built on open-source software. A member of the Bitcoin network can check the information about any transaction and make sure that other participants confirm it.
For a better understanding of what confirmation is, we will analyze the features of a transaction in the Bitcoin network. The structure is as follows:
- When making a payment, transaction information is recorded in a block, which is added to the blockchain. The weight of one block is no more than 1 Mb.
- Each block has a transaction hash added to it with the size of the fee, and then there is a list of other transfers.
- Miners use existing equipment (ASICs, GPU, leased powers) to search for a hash and form new blocks. In this way, they confirm the validity of the transaction.
- After adding six new blocks, the confirmation is considered complete.
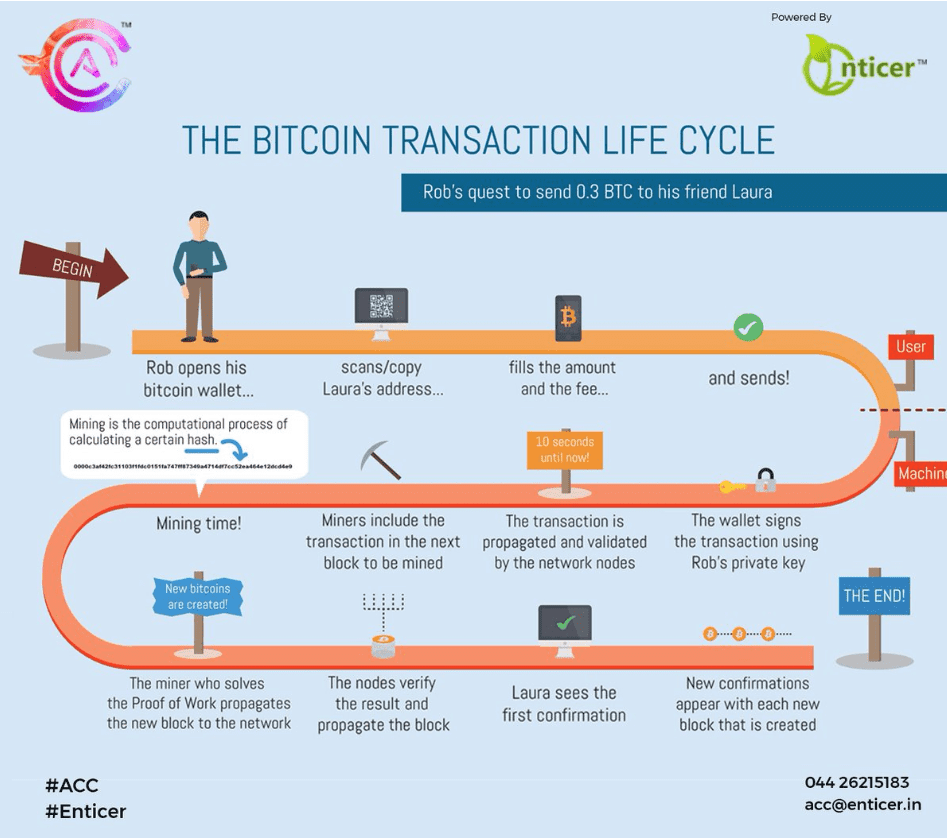
Once all the steps are completed, the cryptocurrency is credited to the wallet. In other words, money is debited from the wallet of the sender and transferred to the recipient. In the absence of confirmation, the transfer may “freeze”, and eventually return to the sender.
The number of confirmations varies depending on the circumstances, amount and features of the wallet.
Let’s highlight the main options for the number of confirmations:
- 0 – the transaction is canceled;
- 1 – one confirmation in the Bitcoin network is enough to conduct an operation for up to 1000 USD;
- 3 – the number of confirmations when transferring from 1,000 to 10,000 USD;
- 6 – the standard number of blocks for Bitcoin clients relevant for transactions worth more than 10,000 USD;
- 60 – a prerequisite for transfers over 1 000 000 USD;
- 100 – upon payment of a reward for the found block;
- 120 – for crediting to the wallet.
Typically, the recipient must wait until six blocks are added. It takes about 60 minutes. The number is chosen for a reason because hacking the network will require at least 10% of the total hash rate.
Thus, confirmation on the Bitcoin network takes from 10 minutes to several hours. When choosing the optimal commission, the operation takes from 20 to 60 minutes. It is impossible to indicate the exact time of the transaction because this parameter depends on many factors, more on this below.
Why confirmation is needed
Beginners often ask about the relevance of confirmations – why they are needed, and what is the use of them. It’s a valid line of questioning because confirmation takes a lot of time. Instead of instantly transferring the funds, network participants are forced to wait for executing the transaction for 20 minutes or more.
The need for confirmation in the Bitcoin network is due to the solution of the following tasks:
- Protection against the re-use of cryptocurrency when the BTC owner simultaneously uses coins to be sent to different users.
- Reducing the risk of fraud and open-source hacking.
- Creating optimal conditions for creating blocks and receiving rewards by miners.
Standard Bitcoin wallets consider a cryptocurrency transaction not confirmed until six new blocks are formed. It means that until the formation of these blocks, the recipient cannot use the coins.

How to reduce the time for confirmation in the Bitcoin network
The speed of operation in a Bitcoin network is a dynamic indicator that varies depending on many aspects. Let’s single out the main ones:
- Network load. The block size has a limit, and the number of people wishing to conduct a transaction is growing every day. At the time of this writing, one block contains about 700 KB. As a result, a queue arises. These queues are called mempool, and appear during sharp jumps in the cryptocurrency rate and increased user activity.
- Low commission fee. For any transfer, a commission fee is established, which is accrued to the miners’ accounts for searching the “block hash.” The higher this parameter, the faster the transaction occurs. Transactions with a minimum payment are processed secondarily. As of January 2020, the average commission fee is about 50 cents per transfer. This means that when registering a transaction, it is worth specifying the commission fee above that minimum.
3. The amount of the transaction. The miner receives a reward taking into account the place occupied by the transaction in the block. If the user does several consecutive transactions for small amounts, they are given a high priority in comparison with a larger transaction.
4. Hacker Attacks. Hackers have a negative impact on the cryptocurrency network. They create many small transfers that require confirmation in the Bitcoin network. For this reason, there are delays in conducting transactions.
How to speed up confirmation
Against the background of what has been said, the question arises whether it is possible to reduce the confirmation time. Experienced participants in the crypto network distinguish the following methods.
- ANTPool. The essence of the method is to use the powers of this very service. On average, two to ten blocks are required for confirmation. The method is free but requires registration. Acceleration is possible if the blocks are formed using ANTPool.
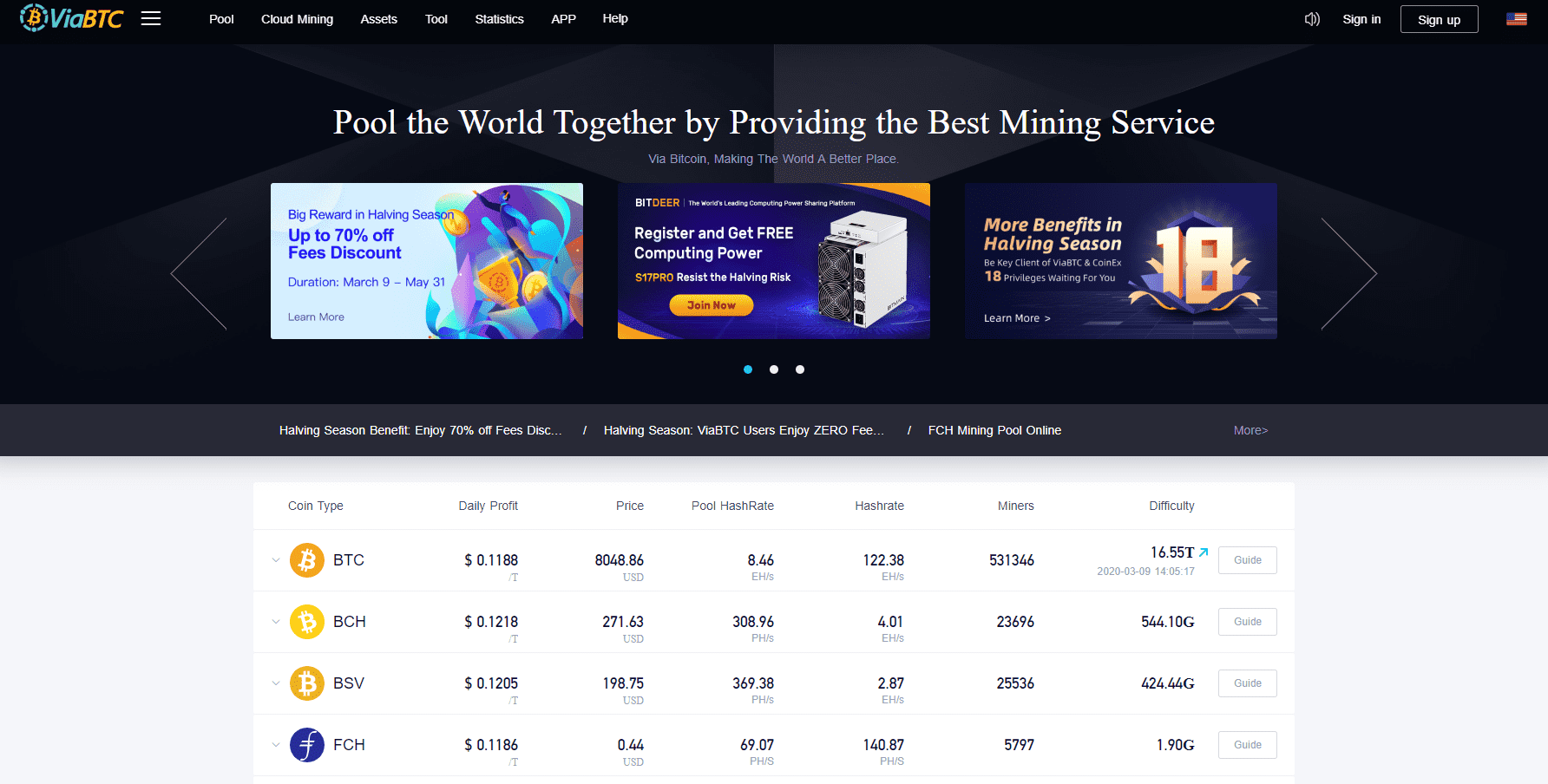
- ViaBTC. Unlike ANTPool, there is no need to register. Click on the link viabtc.com/tools/txaccelerator, enter the transaction ID, solve the captcha, and click on the acceleration button (as a purchase or for free). The downside is that it is difficult to achieve quick confirmation for free due to huge demand. If you managed to do this, the transaction is guaranteed to be carried out within 72 hours. It is worth considering that the service has a limitation. It does not allow you to add more than 100 operations per hour, due to the increased popularity of the option. If you have a ViaBTC mining contract, you can count on five free accelerations but because of the high cost of power, it is irrelevant.
- CPFP. The technique is suitable only for the recipient. You must log in to the wallet to use the service, and then go to settings. There is a mark next to the CPFP field. To accelerate the confirmation in this way, you must have access to the private keys of the Bitcoin storage. In other words, the recipient sends money to themself with a higher commission fee, which increases the speed of the transaction.
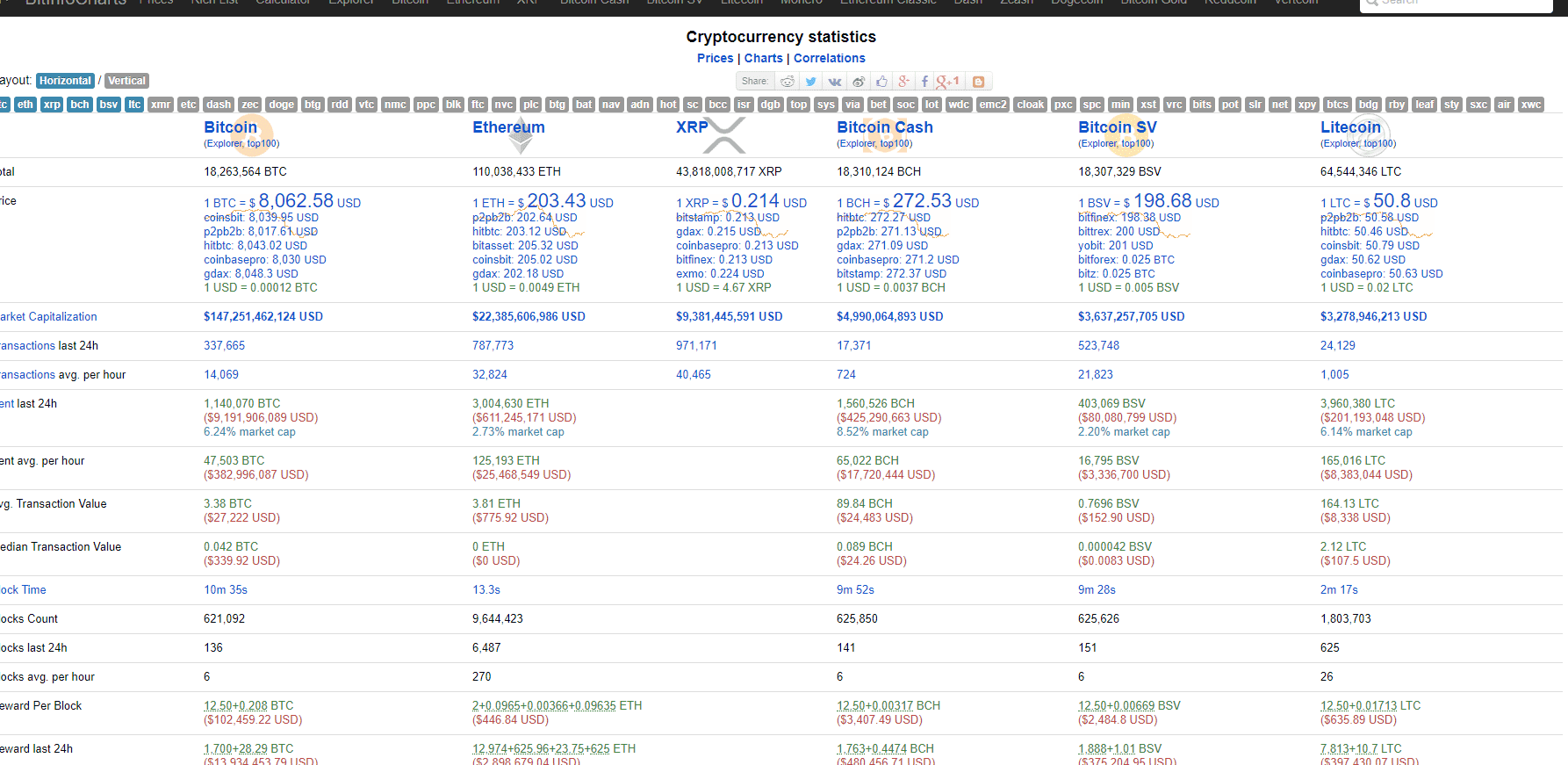
- Double expenses. The possibility of applying the technique depends on the type of wallet because on some it is not used at all. For reliability, wait a few days and make sure that the wallet itself deletes unconfirmed transactions. When the cryptocurrency appears in the balance sheet, a new transaction is occurred. To accelerate the confirmation, it is needed to clarify the commission fee, for example, at bitinfocharts.com/en/comparison/bitcoin-transactionfees.html. Then delete the “stuck” transaction from the wallet and make a new transaction, setting a commission for it above the average.
The next step is to copy the HEX code and use it on any of the websites with accelerators.
A number of wallets themselves delete the Bitcoin transaction if it has not been confirmed within a few days. In such circumstances, you need to conduct another transaction, but with a higher commission fee. The main thing is not to use the old Bitcoin address from the first transaction.
There is also a paid method to reduce the confirmation time in the Bitcoin network. This is an accelerator at BTC.com. You need to click on the link https://pushtx.btc.com/, enter the transaction ID and click on the button Estimate Cost. If you are ready to pay, it only remains to confirm the transaction. As a rule, the price of the service is high. Therefore, a paid transaction accelerator is relevant only when transferring a large amount.
Summary
Confirmation of transactions in the Bitcoin network is a guarantee of protection against double expenses and one of the main rules of the cryptocurrency network. When buying a contract on a cloud mining service, you can become a miner yourself, participate in confirmation and receive rewards. In the future, earned coins can be transferred to other users. To avoid delays, it is recommended to immediately set a higher commission fee and transfer several payments in a row.